
၁။ စက်ဝိုင်းပုံစံ ယက်လုပ်စက် နည်းပညာ မိတ်ဆက်ခြင်း
၁။ စက်ဝိုင်းပုံစံ ချည်ထိုးစက်၏ အကျဉ်းချုပ်မိတ်ဆက်
စက်ဝိုင်းပုံ ယက်လုပ်စက် (ပုံ ၁ တွင်ပြထားသည့်အတိုင်း) သည် ချည်မျှင်ကို ပြွန်ပုံအထည်အဖြစ် ရက်လုပ်သည့် ကိရိယာတစ်ခုဖြစ်သည်။ ၎င်းကို အဓိကအားဖြင့် မြင့်မားသော ယက်လုပ်ထားသော အထည်အမျိုးမျိုး၊ တီရှပ်အထည်များ၊ အပေါက်ပါသော ပုံစံအမျိုးမျိုးသော အထည်များ စသည်တို့ကို ယက်လုပ်ရန် အသုံးပြုသည်။ တည်ဆောက်ပုံအရ ၎င်းကို single jersey စက်ဝိုင်းပုံ ယက်လုပ်စက်နှင့် double jersey စက်ဝိုင်းပုံ ယက်လုပ်စက်ဟု ခွဲခြားနိုင်ပြီး အထည်အလိပ်လုပ်ငန်းတွင် ကျယ်ကျယ်ပြန့်ပြန့် အသုံးပြုကြသည်။
 ၂။ လုပ်ငန်းစဉ်လိုအပ်ချက်များ
၂။ လုပ်ငန်းစဉ်လိုအပ်ချက်များ
(1) လုပ်ငန်းခွင်ပတ်ဝန်းကျင်၏ အပူချိန်သည် အတော်လေးမြင့်မားပြီး ဂွမ်းစသည် အအေးပေးပန်ကာကို အလွယ်တကူ ရပ်တန့်စေပြီး ပျက်စီးစေကာ အအေးပေးအပေါက်များ ပိတ်ဆို့စေနိုင်သောကြောင့် အင်ဗာတာသည် ပတ်ဝန်းကျင်ဒဏ်ခံနိုင်စွမ်း ခိုင်မာရန် လိုအပ်ပါသည်။
(၂) ပြောင်းလွယ်ပြင်လွယ်ရှိသော လက်မဖြင့် လည်ပတ်မှုလုပ်ဆောင်ချက် လိုအပ်သည်။ လက်မဖြင့် လည်ပတ်သည့်ခလုတ်များကို စက်ပစ္စည်း၏ နေရာများစွာတွင် တပ်ဆင်ထားပြီး အင်ဗာတာသည် လျင်မြန်စွာ တုံ့ပြန်ရန် လိုအပ်သည်။
(၃) မြန်နှုန်းထိန်းချုပ်မှုတွင် လိုအပ်သော မြန်နှုန်းသုံးမျိုးရှိသည်။ တစ်ခုမှာ လက်မလည်ပတ်မှုအမြန်နှုန်းဖြစ်ပြီး ပုံမှန်အားဖြင့် 6Hz ဝန်းကျင်ရှိသည်။ နောက်တစ်ခုမှာ အမြင့်ဆုံးကြိမ်နှုန်း 70Hz အထိရှိသော ပုံမှန်ရက်လုပ်မှုအမြန်နှုန်းဖြစ်သည်။ တတိယတစ်ခုမှာ 20Hz ခန့် ကြိမ်နှုန်းလိုအပ်သော အနိမ့်မြန်နှုန်းစုဆောင်းခြင်းလုပ်ဆောင်မှုဖြစ်သည်။
(၄) စက်ဝိုင်းပုံချည်ထိုးစက်လည်ပတ်နေစဉ် မော်တာပြောင်းပြန်လှည့်ခြင်းနှင့် လှည့်ခြင်းကို လုံးဝတားမြစ်ထားသည်၊ မဟုတ်ပါက အပ်အိပ်ရာ၏ အပ်များကွေးခြင်း သို့မဟုတ် ကျိုးသွားလိမ့်မည်။ စက်ဝိုင်းပုံချည်ထိုးစက်သည် single-phase bearing ကိုအသုံးပြုပါက ၎င်းကိုထည့်သွင်းစဉ်းစားမည်မဟုတ်ပါ။ စနစ်သည် ရှေ့နှင့်နောက်သို့လှည့်ပါက မော်တာ၏ ရှေ့နှင့်နောက်သို့လှည့်ခြင်းပေါ်တွင် အပြည့်အဝမူတည်သည်။ တစ်ဖက်တွင်၊ ပြောင်းပြန်လှည့်ခြင်းကို တားမြစ်နိုင်ရမည်ဖြစ်ပြီး အခြားတစ်ဖက်တွင်၊ လည်ပတ်မှုကိုဖယ်ရှားရန် DC braking ကို တပ်ဆင်ရန်လိုအပ်သည်။
၃။ စွမ်းဆောင်ရည် လိုအပ်ချက်များ
ရက်ကန်းရက်တဲ့အခါ ဝန်က လေးလံပြီး လက်မဆန့်/စတင်တဲ့ လုပ်ငန်းစဉ်က မြန်ဆန်ဖို့ လိုအပ်တာကြောင့် အင်ဗာတာမှာ ကြိမ်နှုန်းနိမ့်၊ torque ကြီးနဲ့ တုံ့ပြန်မှုအမြန်နှုန်း မြန်ဆန်ဖို့ လိုအပ်ပါတယ်။ ကြိမ်နှုန်းပြောင်းစက်က မော်တာရဲ့ အမြန်နှုန်းတည်ငြိမ်မှု တိကျမှုနဲ့ ကြိမ်နှုန်းနိမ့် torque အထွက်ကို မြှင့်တင်ဖို့ vector control mode ကို အသုံးပြုပါတယ်။
၄။ ထိန်းချုပ်မှုဝါယာကြိုးများ
စက်ဝိုင်းပုံ ချည်ထိုးစက်၏ ထိန်းချုပ်မှုအပိုင်းသည် မိုက်ခရိုကွန်ထရိုလာ သို့မဟုတ် PLC + လူ့-စက်မျက်နှာပြင်ထိန်းချုပ်မှုကို အသုံးပြုသည်။ ကြိမ်နှုန်းပြောင်းစက်ကို စတင်ရန်နှင့် ရပ်တန့်ရန် တာမီနယ်များဖြင့် ထိန်းချုပ်ထားပြီး ကြိမ်နှုန်းကို အန်နာလော့ပမာဏ သို့မဟုတ် ဘက်စုံကြိမ်နှုန်း ဆက်တင်ဖြင့် ပေးသည်။
အခြေခံအားဖြင့် မြန်နှုန်းများစွာပါဝင်သော ထိန်းချုပ်မှုစနစ်အတွက် ထိန်းချုပ်မှုပုံစံနှစ်ခုရှိသည်။ တစ်ခုမှာ ကြိမ်နှုန်းကို သတ်မှတ်ရန် အန်နာလော့ကို အသုံးပြုသည်။ ဂျောက်ဂျက်ဖြစ်စေ၊ မြန်နှုန်းမြင့်နှင့် မြန်နှုန်းနိမ့် လည်ပတ်မှုဖြစ်စေ အန်နာလော့အချက်ပြမှုနှင့် လည်ပတ်မှုညွှန်ကြားချက်များကို ထိန်းချုပ်မှုစနစ်မှ ပေးထားပြီး နောက်တစ်ခုမှာ ကြိမ်နှုန်းပြောင်းစက်ကို အသုံးပြုရန်ဖြစ်သည်။ တပ်ဆင်ထားသော ကြိမ်နှုန်းများစွာပါဝင်သော ထိန်းချုပ်မှုစနစ်သည် ကြိမ်နှုန်းများစွာပါဝင်သော ပြောင်းလဲမှုအချက်ပြမှုကို ပေးစွမ်းပြီး ဂျောက်ဂျက်ကို အင်ဗာတာကိုယ်တိုင်မှ ပံ့ပိုးပေးပြီး မြန်နှုန်းမြင့် ယက်လုပ်သည့်ကြိမ်နှုန်းကို အင်ဗာတာ၏ အန်နာလော့ပမာဏ သို့မဟုတ် ဒစ်ဂျစ်တယ်ဆက်တင်ဖြင့် ပေးထားသည်။
၂။ လုပ်ငန်းခွင်လိုအပ်ချက်များနှင့် အကောင်အထည်ဖော်မှုအစီအစဉ်
(၁) လုပ်ငန်းခွင်လိုအပ်ချက်များ
စက်ဝိုင်းပုံစံ ချည်ထိုးစက်လုပ်ငန်းတွင် အင်ဗာတာ၏ ထိန်းချုပ်မှုလုပ်ဆောင်ချက်အတွက် ရိုးရှင်းသော လိုအပ်ချက်များရှိသည်။ ယေဘုယျအားဖြင့် စတင်ခြင်းနှင့် ရပ်တန့်ခြင်းကို ထိန်းချုပ်ရန် တာမီနယ်များနှင့် ချိတ်ဆက်ထားပြီး၊ အန်နာလော့ ကြိမ်နှုန်းကို ပေးထားသည် သို့မဟုတ် ကြိမ်နှုန်းကို သတ်မှတ်ရန် မြန်နှုန်းများစွာကို အသုံးပြုသည်။ လက်မဆန့်ခြင်း သို့မဟုတ် မြန်နှုန်းနိမ့် လည်ပတ်မှုသည် မြန်ဆန်ရန် လိုအပ်သောကြောင့် အင်ဗာတာသည် မော်တာကို ထိန်းချုပ်ရန် ကြိမ်နှုန်းနိမ့်တွင် ကြီးမားသော ကြိမ်နှုန်းနိမ့် torque ကို ထုတ်လုပ်ရန် လိုအပ်သည်။ ယေဘုယျအားဖြင့် စက်ဝိုင်းပုံစံ ချည်ထိုးစက်များကို အသုံးချရာတွင် ကြိမ်နှုန်းပြောင်းစက်၏ V/F မုဒ်သည် လုံလောက်ပါသည်။
(၂) Debugging ပုံစံ ကျွန်ုပ်တို့ လက်ခံကျင့်သုံးသော ပုံစံမှာ- C320 series sensorless current vector inverter ဖြစ်သည်။ ပါဝါ- 3.7 နှင့် 5.5KW
၃။ အမှားပြင်ဆင်ခြင်း ကန့်သတ်ချက်များနှင့် ညွှန်ကြားချက်များ
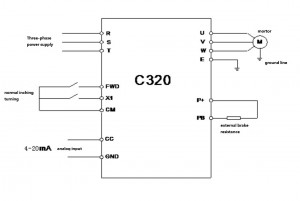
၁။ ဝါယာကြိုးပုံ
၂။ ဒီဘာဂ် ကန့်သတ်ချက် ဆက်တင်
(၁) F0.0=0 VF မုဒ်
(၂) F0.1=၆ ကြိမ်နှုန်း အဝင်ချန်နယ် ပြင်ပ လျှပ်စီးကြောင်း အချက်ပြမှု
(၃) F0.4=0001 ပြင်ပ တာမီနယ် ထိန်းချုပ်မှု
(၄) F0.6=0010 ပြောင်းပြန်လည်ပတ်မှု ကာကွယ်ခြင်းသည် အကျုံးဝင်ပါသည်
(၅) F0.10=၅ အရှိန်မြှင့်ချိန် 5S
(၆) F0.11=0.8 အရှိန်လျှော့ချိန် 0.8S
(၇) F0.16=6 သယ်ဆောင်သူကြိမ်နှုန်း 6K
(၈) F1.1=4 လိမ်အားမြှင့်တင်မှု ၄
(၉) F3.0=6 X1 ကို ရှေ့သို့ ပြေးရန် သတ်မှတ်ပါ
(10) F4.10=6 သည် jog frequency ကို 6HZ သို့ သတ်မှတ်ပါ
(၁၁) F၄.၂၁=၃.၅ ပြေးနှုန်းအရှိန်မြှင့်ချိန်ကို ၃.၅ စက္ကန့် သတ်မှတ်ပါ
(12) F4.22=1.5 သည် jog deceleration အချိန်ကို 1.5S သို့ သတ်မှတ်ပေးသည်
အမှားပြင်ဆင်ခြင်းမှတ်စုများ
(1) ပထမဦးစွာ မော်တာ၏ ဦးတည်ရာကို ဆုံးဖြတ်ရန် jog လုပ်ပါ။
(၂) ဂျော့ဂ်ျလုပ်နေစဉ် တုန်ခါမှုနှင့် နှေးကွေးသောတုံ့ပြန်မှုပြဿနာများနှင့် ပတ်သက်၍ ဂျော့ဂ်ျလုပ်ခြင်း၏ အရှိန်နှင့် နှေးကွေးချိန်ကို လိုအပ်ချက်များအလိုက် ချိန်ညှိရန် လိုအပ်သည်။
(3) သယ်ဆောင်လှိုင်းနှင့် torque မြှင့်တင်မှုကို ချိန်ညှိခြင်းဖြင့် အနိမ့်ကြိမ်နှုန်း torque ကို ပိုမိုကောင်းမွန်အောင် ပြုလုပ်နိုင်သည်။
(၄) ဂွမ်းစသည် လေပြွန်ကို ပိတ်ဆို့ပြီး ပန်ကာရပ်သွားကာ အင်ဗာတာ၏ အပူပျံ့နှံ့မှု ညံ့ဖျင်းစေသည်။ ဤအခြေအနေသည် မကြာခဏ ဖြစ်ပွားလေ့ရှိသည်။ လက်ရှိတွင် ယေဘုယျအင်ဗာတာသည် အပူအချက်ပေးစနစ်ကို ကျော်သွားပြီး ဆက်လက်အသုံးမပြုမီ လေပြွန်ရှိ အမွေးအမှင်များကို ကိုယ်တိုင်ဖယ်ရှားသည်။
ပို့စ်တင်ချိန်: ၂၀၂၃ ခုနှစ်၊ စက်တင်ဘာလ ၈ ရက်